STEREO-WAVES Instrumentation
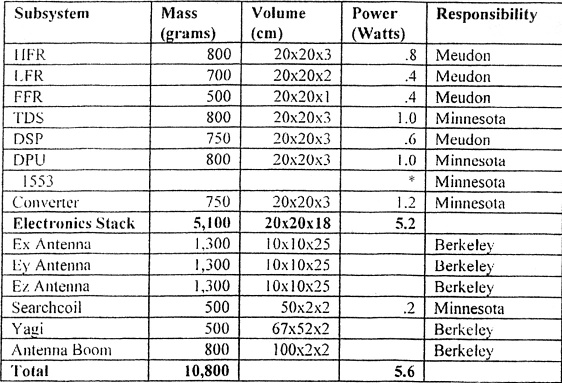
Figure 7 shows the block diagram of the complete STEREO / WAVES instrument (with the common DPU option). Block diagrams of the instrumentation (HFR, LFR, FFR, TDS) is shown in figures 8 and 9. Tables of instrument sensitivity and resource requirements can also be found on figures 4 and 11. The instrument complement is similar to experiments that our group has flown on Ulysses, Wind and Cassini. This instrument package gives the essential coverage in frequency and in dynamic range for the tracking of emissions from the sun, as well as for understanding the plasma processes that give rise to them. The instrument as proposed requires 10.8 kg, 5.6 W, and 455 b/s.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
SWAVES Antenna System
As its primary sensors, SWAVES will use three mutually orthogonal monopole stacer antenna elements, each 6 meters in length. The three monopoles will be deployed away from the sun so that they remain out of the fields of view of sunward looking instruments as shown in Figure 6. The preferred configuration has all three antennas mounted at the same location on the spacecraft body.
{kind=link}
Stacer antennas were chosen for their excellent thermal properties, stiffness, reliability, and heritage. Several hundred stacer elements have been used successfully on NASA Wallops sponsored sounding rocket flights. They also have been used on many tens of scientific and classified satellite missions. They have been employed as electric field sensors/antennas, as well
as to support deployed instruments or spacecraft ballast masses. Stacer elements used on the recent Polar and FAST missions as spin axis booms provide an impressive example of what can be achieved. Ground testing indicated that the deviations from a straight line were less than 2 cm. This was confirmed in the on orbit deployment, where the spacecraft sensors were unable to detect any spin axis change, or any level of jitter.
Figure 5 shows the expected noise properties and response of the proposed 6 meter stacers. The solid line depicts observations from the Wind/WAVES experiment of solar type III and type II radio bursts. The noise curve includes Shott noise from photoelectron emissions and preamplifier voltage and current noise merged with the antenna response. The cosmic background is superimposed (dashed line). The antenna design optimizes the radio burst tracking in the 16MHz - 30kHz range and maintains a high signal-to-noise ratio for expected solar type II, type III, and other solar and interplanetary radio emissions. The first antenna null occurs at ~83 MHz placing the minimum noise levels between 200kHz and 16MHz.
{kind=link}
Each 6-meter stacer antenna element has 1.0 kg mass and requires 0.3 kg of mounting hardware. The boom element identified as most suitable for the STEREO mission is fabricated from 0.005 inch thick by 4-inch wide Beryllium Copper strip material. Deployed lengths up to six meters have been produced in this geometry. The element's diameter at the base is about one inch and it tapers to 0.6 inch at the tip. The deployed antenna elements are very stiff with a cantilever resonance frequency of 0.22 Hz. A ~3.0 meter tip deflection is required to buckle the boom. When stowed, the spring element fits compactly into a two-inch diameter cylinder. This design was first developed for the University of Surrey microsatellite program, UOSAT. It has since been used as a gravity gradient boom for about a dozen of these missions.
Each of the antenna elements will be restrained for launch and released on orbit by a single, small (50 gram), non-explosive nickel titanium shape memory alloy pin puller. This boom mechanism will also include spring-loaded nozzles that both expand to accommodate the boom taper, and telescope outward to provide bending support for the deployed boom. The spring driven telescoping action also provides a substantial push off force, so as to assure reliable deployments. A lightweight string or wire that is stretched along its centerline closely controls the deployment stroke of the stacer. This line is stowed prior to deployment in an axial feed bobbin, or on a small rotating spool
Preamplifiers
There will be a high input impedance preamplifier connected to each of the three electric monopoles. These are required in order to prevent loading of the antennas which are electrically equivalent to small capacitors in the voltage mode used by the instrument. The preamplifiers will be of a very classical and frequently used design with a low-noise JFET as the first stage followed by a PNP bipolar transistor and an op-amp.
With co-located antennas, these preamplifiers will be included in the main SWAVES electronics package itself. If the antenna units cannot be co-located, external preamplifier enclosures will be required. Each of three enclosures would be in a separate small box weighing about 80g each. The box size is estimated to be 8x5x3H cm. The total extra harness weight is estimated to be 200g (TBC). The difference in weight for the main box between the two options is only 60g.
Radio Receivers
As shown in Figure 8 there are five radio receivers in the SWAVES instrument. They cover the following frequency ranges:
| LFR Lo | 10-40 kHz |
| LFR Hi | 40-160 kHz |
| HFR | 0.125-16.075 MHz |
| FFR1 | 50 MHz fixed frequency |
| TDS | 250,000 samples/second time series snapshots |
All of the receivers except the TDS are controlled by the ADSP processor which itself is controlled by the common DPU. The TDS is controlled directly by the DPU. If SWAVES does not share a common DPU with IMPACT, the TDS will be controlled by the ADSP.
The LFR Lo receiver uses the dipole formed by the Ex and Ey monopoles (although either monopole alone may be used by command). Using the monopole elements in dipole mode (the difference between Ex and Ey monopole antennas) provides common mode noise reduction giving improved signal quality. A variable gain amplifier is used to amplify the RF signal within the observation band of 10kHz to 40kHz to a constant level. This is thus an Automatic Gain Control (AGC) system. A 12-bit Analog-to-Digital Converter (ADC) samples the signal as well as the control voltage.
The signal before detection contains a constant power level replica of the input signal over a relative frequency range of two octaves. Further frequency analysis is performed by the ADSP specialized processor which uses the wavelet-type analyses which have been developed by the Paris Observatory for the Wind, Cluster, and Cassini spacecraft. The signal is analyzed in 16 logarithmically spaced bands with 9% relative bandwidth and channel separation. A power spectrum is calculated for each 256 samples of the input signal
In the LFR Hi band, part of the Ex/Ey dipole receiver used in LFR Lo is used. The AGC amplifier operates in a higher band (40kHz-160kHz). A second receiver chain (AGC + detection + ADC) is added for measurement of the Ez signal. The processor commands the two A/D converters to sample the signals simultaneously. With the two time-series of points the ADSP processor is capable of calculating the complete cross-correlation matrix, giving the phases between Ex and Ez or Ey and Ez. This provides relative phases giving a direction-finding capability of radio bursts in this frequency range.
In the normal mode of operation, spectra from the low band will be accumulated giving the average and peak values at each of 16 frequencies for a programmable but large number (e.g 100s) of spectra. Each band will generate 16 24-bit (12 bits for the average, 12 bits for the peak) samples per frequency sweep with a nominal sweep rate of once every 16 seconds which gives a bit-rate of about 12 bits per second. While the data rate is low, either lossless or lossy compression techniques may be used to further reduce the telemetry requirements for this receiver.
In the high band, two spectra from two antenna pairs (a total of 4 spectra) will be obtained giving the power and phase for each of 16 frequencies. A full measurement sweep consists of 16 sets of 8 12-bit samples per with a nominal sweep rate of once every 16 seconds which gives a bit-rate of about 98 bits per second for each band. Either lossless or lossy compression techniques may be used to further reduce the telemetry requirements for this receiver.
The HFR receivers actually designate two separate "logical" receivers and two "physical" receivers. There are two physical receivers, one connected to a choice of the Ex or the Ey monopoles, or to the two monopoles used as a dipole, while the other is always connected to the Ez monopole. These are identical superheterodyne receivers. The local oscillator is a frequency synthesizer. The difference frequency from the mixer passes through a very selective 21.4MHz crystal filter (IF frequency) and gives a frequency range of 125kHz to 16.075MHz. in steps of 50kHz. A second set of mixers transposes the 21.4 MHz signals to about 70kHz in order to have signals in a convenient range for AGC amplification and digitization. The raw signals as well as the AGC control voltages are digitized with 8-bit A/D converters (one on each of the two physical channels) for handling by the ADSP processor.
The two logical receivers HFR1 and HFR2 correspond to signal analyses (programmable) which are different for the lower and upper portions of the frequency range, although the same hardware is used for both, as explained above. At the lower end, below about 2MHz, it will be important to measure the direction of arrival of the input signals, with good frequency resolution. This implies simultaneous sampling of the two pre-detection signals and a cross-correlation between them performed by the ADSP processor. In direction finding mode, a frequency will be selected, and one physical receiver will be on Ex, and the other on Ez. Simultaneous time series are collected and processed by the ADSP. Digital signal processing techniques give the amplitude for the two channels as well as a complex cross correlation coefficient which gives the relative phase between the two channels. Immediately after an Ex/Ez sample is obtained, channel one is switched to Ey while channel two remains on Ez. Another time series on Ey/Ez is obtained and processed as above. Using this technique, relative phases are obtained between Ex, Ey and Ez which allows the determination of the direction of arrival (direction finding). A more complete explanation of this technique for direction finding is in Ladreiter et.al., [1995]. At frequencies above about 2 MHz only the amplitude of the Ex/Ey dipole and the Ez monopole are needed, with reduced frequency resolution. The two logical receivers will be treated by the processor as two separately commandable instruments even though the hardware is the same.
The data from these modes will be assembled into reasonable packets for transmission to the ground. For example, a packet would typically include data from a full frequency sweep or other natural instrument cycle. As an estimate, we expect to telemeter 1 sweep every 16 seconds. In the low band (direction finding), we have 8 8-bit samples/frequency and 37 frequencies/sweep which gives a bit-rate of 148 bits per second (excluding packet overhead). In the high band (spectral analysis), we have 2 8-bit samples/frequency and 71 frequencies/sweep which gives a bit-rate of 71 bits per second. As in past experiments, the data produced by the HFR can be losslessly compressed to reduce its telemetry requirement. If telemetry should be further constrained we have employed lossy compression techniques to further reduce the bit-rate requirement.
The FFR1 receiver is a fixed frequency receiver. Its principle of operation is otherwise the same as that of the HFR receivers (i.e. they are superheterodyne fixed frequency receivers). FFR1 will measure the signal at a frequency of the order of 50MHz on one of the three monopoles.
The DSP will build up packets from each receiver and format them for telemetry to the ground. We expect to make ten 12-bit samples on two channels each second which is an acquisition rate of 240 bits per second. Because this data is expected to be bursty, we will only send data (including a time-stamp) to the ground when there is activity giving a reduction in downlink bit-rate of a factor of ten. That is to say, we expect to produce on the order of 24 bits per second with these two fixed receiver channels.
The ADSP processor board contains a processor from the ADSP-2100 family from Analog Devices. The Paris Observatory has used these processors on Wind, Cluster, and Cassini. The processor will control the five receivers, perform the signal processing needed for the LFR spectrum analysis and the HFR1 direction finding, receive telecommands from the DPU and send telemetry to the DPU.
In addition to the processor, the board will contain PROM memory for the pre-loaded instructions and coefficients, RAM memory into which the PROM contents will be transferred at turn-on, RAM memory for data processing, storage and scratch area, and an FPGA which will contain all the "glue chip" functions and the synthesizer control. The A/D converters will be physically located on the processor board.
The analog portion of the radio receivers will take up the upper two slices of the main electronics stack and the ADSP processor board a third slice
The TDS (Time Domain Sampler) is a broadband waveform sampler with 3 channels. Figure 9 shows a block diagram. A similar instrument was flown on Wind, but the analog to digital conversion will be improved for SWAVES and simplified with the use of off the shelf technology. The three channels will be connected to the monopole electric antennas Ex, Ey and Ez. The TDS is intended to measure impulsive or bursty events of large amplitude (such as Langmuir waves) at high time resolution. It records many events in a mass memory saving the "best" events for later transmission to the ground.
While it will have a variety of operating speeds, the nominal mode will be to sample all 4 channels simultaneously at 250k samples/s. Signals from the 4 antennas will be conditioned and amplified and sent through a low pass (anti-aliasing) filter at a frequency appropriate to the sampling frequency. Time series samples will be made with a 12-bit analog to digital converter. After conversion they will be logarithmically compressed using a mu-log compression table. Hardware comparators on one channel will detect peak absolute values and, using a shift register, arrange the data in a large (8192 8-bit samples/event/channel) section of memory with the peak value located in the center of the event (see typical Wind/WAVES event on Figure 10 ). The microprocessor is alerted when a full event is captured.
{kind=link}
An intelligent mechanism is used to reduce the number of "uninteresting" events that are sent to the ground. After collecting an event, the processor invokes an algorithm to determine a "quality" value for the event. When it is time to send a new event to the ground, the event with the highest quality is used. When it is time to overwrite an existing event in memory with a new event, the event with the lowest quality is discarded. The algorithm used to determine the quality can and will be changed during the mission. In addition, a number of random events will also be sent to the ground without regard for their quality in order to provide unbiased statistics.
The bit-rate required for the TDS is quite variable as it could use anywhere from a few bits per second to a few million bits per second. On STEREO we plan to telemeter about 20 events per day which gives an average bit-rate of only 60 bits per second.
In order to monitor wave activity continuously as well as to produce statistics for testing Stochastic Growth Theory, the TDS will also produce a very low rate data stream known as the "interval maximum". Hardware comparators will record the largest value observed during a programmable time period of the order of one minute providing a coarse overview of transient wave activity. The bit-rate required is about one half bit per second.
Housekeeping and low rate science
This system provides digitized and selectable housekeeping data to monitor the status and health of the various parts of the instrument. It will consist of a set of sample and holds, and an analog to digital converter. It will prepare an instrument housekeeping packet for telemetry to ground roughly once every two minutes. This packet will contain internal status flags, command verifications, mode indications, and voltage and current monitors. The housekeeping will require roughly 20 bits per second.
It will also be used, at a sampling rate of a few tens of samples per second, to obtain the data to be used in the study of density fluctuations and low frequency wave modes. The exact set of quantities to be measured will depend on negotiations with selected experiments, but we would expect magnetic fields from the DC magnetometer, counting rates from a plasma instrument set at a fixed energy, as well as the potentials of the four antennas of SWAVES. A set of these measurements will be time stamped and saved to an internal buffer. Periodically, and also in periods of intense Langmuir wave activity, about 30 seconds of data of this type will be telemetered.
We will also provide the once per second housekeeping data called for in the AO. This is assumed to be simply an "aliveness" packet.
Calibration
The SWAVES instrument will contain its own internal calibration circuitry. About once per day, an internal calibration sequence will be invoked. A noise generator will be switched on and connected to the analog input lines. This periodic calibration will allow the team to continually observe and update the background noise levels and could be an early indication of problems. This can be especially useful as a short functional test during ground testing.
Power Converter
SWAVES requires two switched 28V (22-35V) lines from the spacecraft power system. We will use commercially available crystal controlled DC-DC converters to generate the SWAVES required voltages (e.g. +5, �12) in a redundant fault tolerant design.
DPU
The SWAVES team recognizes that many of the wave observation we will make are related to observations to be made by an instrument measuring the local plasma and magnetic field. To that end, we have had discussion with a proposing plasma team (IMPACT) led by Dr. Janet Luhmann of the University of California at Berkeley. Our two teams have identified ways in which a common data processing unit (DPU) could save resources and greatly increase the scientific return of the separate instruments. Our proposal therefore includes a common DPU which would be shared with the IMPACT team if they are selected. If, after selection, a shared DPU is not desired, SWAVES can simply move the processing load for the TDS and the 1553 interface to the ADSP processor. For the purposes of this section, we assume a common DPU will be implemented.
The DPU will be based on an SA3300 microprocessor. This processor has adequate processing power for our needs, has the advantage of being rad-hard and, since the Wind/WAVES team and the FAST team (at Berkeley) used it, a large amount of well tested flight software is available off the shelf. To the processor, we will attach banks of rad-hard RAM and ROM. To support the TDS, a larger section of RAM will be included although this data RAM need not be rad-hard. We will attach a number of glue logic and peripheral devices (e.g. interrupt controller, timers, etc.) which will largely be composed of a gate array chips. For sending telemetry to and receiving telecommands from the spacecraft, we will include a 1553 interface bus controller and any external memory it requires. Interfaces for the various instruments and receivers (both WAVES and IMPACT) will simply be memory mapped serial and/or parallel ports.
Because we have used this processor before, a great deal of tested flight software exists (50,000 lines of code were written for Wind/WAVES) and much of this software can be reused. While the Wind spacecraft had a fixed format telemetry system, the WAVES team favored the utility of packetized telemetry and incorporated a packet telemetry stream on top of the spacecraft�s fixed format stream. This recent experience with packet telemetry will make it easier for the SWAVES team to build telemetry packets. As with most projects, some new software will be required. Areas where new software will be needed include the control of the 1553 interface, specific hardware interfaces for the various subsystems and CCSDS packet assembly.
In order to be assured of having the needed computer hardware and software on time, we plan a simple program in which additional engineers or programmers at Minnesota, Berkeley or another institution can be added and can become productive with little delay. Our technique for eliminating bottlenecks which have hampered other development projects will be to develop a breadboard DPU at a very early point in the program. This breadboard DPU will be based on simple and inexpensive commercial PC hardware. Using this simple hardware configuration, engineers will design pseudo flight hardware to interface to their particular instrument. Using a simple DPU emulator running on the PC, programmers will write pseudo flight software in the C programming language. In this way, new engineers can be added to the team as workload indicates. Each institution, indeed each sub instrument, can have its own breadboard DPU configuration running at a very early point in the program.
Using the beginnings of our telemetry access system (SWlib) which is described below, scientists and engineers will be able to access data from the fledgling instruments at an early point. As SWlib grows, the same software tools, access and display methods will be used throughout the program, eliminating unnecessary software rewrites and offering easy and uniform access to instrument data.
As we move on to design the engineering model DPU, we will take the designs for pseudo flight hardware and incorporate them into the DPU design. In many cases, we will simply transfer programmable gate array code from the breadboard DPU. In the same way, we will take the pseudo flight software written in C on the breadboard DPU and convert it for use in the real DPU. At this point in our planning the flight DPUs (engineering model and two flight models) will be built at Minnesota although this modular design program would allow this and other activities to move around as needed.
A large number of the SWAVES DPU flight hardware and software components have been flown in the recent past. Most hardware designs are well tested and mature. Since both the DSP processor and the general purpose DPU processor were flown on Wind a large body of tested flight software is available for use on STEREO. As a result, our risk is minimized both in terms of schedule and in cost.
ElectroMagnetic Cleanliness
Many of the SWAVES scientific objectives are based on the measurement of low-level signals for which maximum sensitivity is required. Several inexpensive measures must be taken at the spacecraft and project level to ensure that the STEREO spacecraft are clean from the point of view of both conducted and radiated electromagnetic interference. The sensitivity of the SWAVES instrument will be approximately 2� 10-9 volts/meter/root-Hertz in the frequency range of 1 kHz to 16 MHz and 3� 10-7 volts/meter/root-Hertz below 100 Hz, with a smooth transition from 100 Hz to 1 kHz. In addition, the TDS is sensitive to impulsive interference of duration as short as a fraction of a microsecond. Although these sensitivities may appear to require an excessively "clean" spacecraft, they are not difficult to achieve if good EMC practices are incorporated in the spacecraft design. Among others, the Cassini and Image spacecraft give recent testimony to this fact.
It is important to realize that an EMC-clean spacecraft is beneficial for every instrument, as well as for spacecraft systems. Given the progress made in understanding the principles, these EMC controls are easy to implement and do not require extensive or expensive testing. The STEREO / WAVES team will encourage the Project to set up a consultant EMC board to study the general grounding and shielding philosophies, instrument-particular exceptions/waivers, and test procedures for the mission. This committee would define an inexpensive, coherent scheme for minimizing interference. For example, a single point or "star" ground has often been suggested as the path to a clean spacecraft. This can be a burdensome requirement on many types of measurement and has been shown not to be very effective at high frequencies. Instead of such arbitrary rules, the EMC committee would work to find acceptable compromise using a "best engineering practices" point of view. Many of the interests of an EMC committee will overlap with other spacecraft cleanliness issues such as magnetic cleanliness and electrostatic cleanliness.
Currents induced in the spacecraft structure are a major source of EMC disturbances because any voltage on the spacecraft surface induced by such currents will couple readily into the antennas. Good grounding and harness shielding practices will control these currents and should be the basis of an EMC "philosophy". Power converters also represent a serious source of interference if left uncontrolled. The EMC committee would develop a plan for the use of crystal controlled DC-DC conversion in all spacecraft systems (including instruments) which can limit the interference to narrow frequency bands. The committee would review all subsystem test results and, in the case of test results in excess of defined limits, determine what remedial action (if any) is required. Finally, the STEREO spacecraft should be tested in a large EMC chamber at some point in the integration and test process.
Ground Support Equipment
The SWAVES team will build several pieces of ground support equipment for use on STEREO. The central item will be a spacecraft simulator which will act as a 1553 bus master to request telemetry from and send telecommands to the SWAVES instrument. This will be based on a simple and inexpensive commercial PC product which will be equipped with a commercial 1553 bus master interface. We will develop software to acquire, archive and disseminate the instrument�s telemetry and to send instrument telecommands. This system will also allow us to program the instrument telemetry rate giving a turbo mode so as to shorten testing time. The system will allow scientists and engineers to easy access the telemetry stream using the SWlib software package (described below).
In order to test the instrument from end-to-end, SWAVES will procure several programmable frequency synthesizers. Positioned close to the SWAVES antennas, signals from this stimuli rack will be injected into the antennas allowing complete calibration on the bench and on the spacecraft. On Wind/WAVES we developed a programming language to allow the automation of test routines (by sending sequences commands to the instrument and stimuli equipment) as well a large suite of routines. For STEREO we will use the spacecraft simulator computer to run this test environment.
2.2 - Mission Operations and Data Analysis
The SWAVES operations and data handling emphasize simple and comprehensive interfaces to data, and an uncluttered commanding and experiment management concept. These software systems will be built with the instrument as it matures, so that the same tried and tested data access and commanding methods used during development, integration, and test, will move seamlessly into the post-launch environment. The SWAVES team has previously been highly successful with this approach on the Wind/WAVES experiment, so that at instrument turn-on, software that had already been in use during the pre-launch environment was immediately available to provide reliable health and safety monitoring, direct access to scientific content, and an error-free commanding environment.
2.2.1 - Mission Operations
Instrument Commanding
The focal point for SWAVES instrument commanding and operations will be at the University of Minnesota (UMN), which also commands Wind/WAVES. Science team members will submit commanding requests to UMN, which will coordinate requests with other team members and resolve any conflicts. Once commands are agreed upon, UMN personnel will create daily command loads using software similar to that currently in use for Wind/WAVES, and transmit the request to the Spacecraft Operations Center (SOC). UMN will coordinate with the SOC to ensure the timely and accurate implementation of commands, and will notify the science team of the impending activity. UMN will also ensure that commands are correctly executed and follow up any anomalies that occur. The previous experience of this command team ensures correct commanding and the use of well-tested software minimizes the probability of error.
The STEREO / WAVES instrument will require (on average) a few time-tagged commands each day throughout the mission which will total a few hundred uplinked command bits per day. Other than during initial operations and problem resolution, no real time commanding is needed. The instrument will require occasional flight software uploads. These uploads will typically be on the order of several thousand to several tens of thousands of bits per upload. Larger uploads are not expected but may be required. Early in the mission we may require a few uploads per month. As the mission proceeds, fewer and fewer uploads will be needed.
Anomaly Handling
If a spacecraft or instrument anomaly occurs, UMN will be responsible for the notification of team members, and the resolution of the problem with the SOC. UMN will provide, in consultation with the team, any work-around or flight software patches that are necessary to resolve the problem, and will also supply the SOC with procedures to invoke in the event of an anomaly that tends to recur. Personnel will be on call for emergencies that occur in non-prime shifts using a pager.
UMN will also maintain a commanding database that shows the incidence and types of commands sent during the mission and the resulting state of the instrument so that researchers can identify periods when the instrument was configured in a particular way.
Post Launch Requirements
Shortly after launch, the SWAVES team will conduct a commissioning phase in which the instrument will be turned on, antennas and boom deployed and overall instrument performance assessed. At instrument turn-on, SWAVES will have a number of command procedures and instrument checkout routines to execute. Following boom deployment, the monopole elements can be deployed with separate spacecraft deployment commands. Because the deployment of these appendages affect spacecraft stability, it is best that their deployments be activated by the spacecraft rather than by the instrument. After deployment, the boom and monopole antenna units are completely passive. We expect these deployments and initial assessment activities can be completed in one day.
Once operational, the SWAVES instrument will operate in its normal mode with roughly the same power consumption at all times. Once each day we will execute a short internal calibration in which an internal noise generator is activated. This will increase our power consumption by about one Watt for a period of five minutes per day. Other than the internal calibration, there are no special modes or periods of high or low activity. The SWAVES bit-rate requirement will also remain constant throughout the mission although SWAVES is capable of increasing its science return with the use of a higher bit-rate if that were available. SWAVES will not impose any special requirements on mission operations.
SWAVES pointing requirements are minimal and will not impose pointing requirements on the spacecraft in excess of those imposed by imaging instruments. It may be the case that other instruments (e.g. a magnetometer) may require occasional spacecraft roll maneuvers in order to characterize the magnetic fields of the spacecraft. Such spacecraft maneuvers would also be used by the SWAVES team to help determine the actual antenna pattern. The SWAVES team will coordinate these spacecraft rolls such that earth based radars will broadcast at various frequencies in the direction of the two STEREO spacecraft. The signals received as a function of antenna orientation will allow an accurate mapping of the monopole antenna pattern.